
利用现有的技术,科学家们能够在太空中移动各种小物体。该软件根据被举起物体的形状调整夹持器,然后机器人手臂将物体运送到目标位置。
不接触的抓取原理也有经济效益:当与传统机器人一起工作时,几乎每一个新的形状都需要一个不同的夹持器。声学夹持器消除了大量昂贵的高精度夹持器的需要。机器人手臂本身甚至不需要非常精确:“精确的定位是由软件控制的声波决定的。”schuck解释说。
最初,schuck想要用他的eth先锋研究员基金来决定如何在实践中使用机器人夹持器。“主要目的是探索潜在的应用领域,并在行业内打开大门。”schuck说。这一创新可能会引起制表行业的兴趣,因为在制表行业,高精度的微观力学对于处理昂贵的微小部件至关重要。例如,齿轮先涂上润滑油,然后测量润滑油层的厚度。即使是最轻微的接触也会损坏润滑剂的薄膜。”对于schuck的技术来说,微芯片生产可能是另一个有吸引力的市场。
schuck将从15万瑞士法郎的奖学金中拿出一部分,为潜在客户制作一种“开发工具包”。这包括一个机器人夹持器,控制软件和指令。schuck强调他仍然不知道最终的产品会是什么样子。
“这取决于我从行业得到的反馈。”schuck希望能找到一些有兴趣的人与他合作,进一步开发声波夹持器。一方面,这将有助于满足现有的市场需求。另一方面,schuck希望这项技术不仅能在实验室工作,也能在现实世界中发挥作用。如果能在2021年春天实现这一目标,schuck认为他就能根据自己巧妙的商业创意创办一家初创公司。
图片来源:eth zürich / stefan weiss
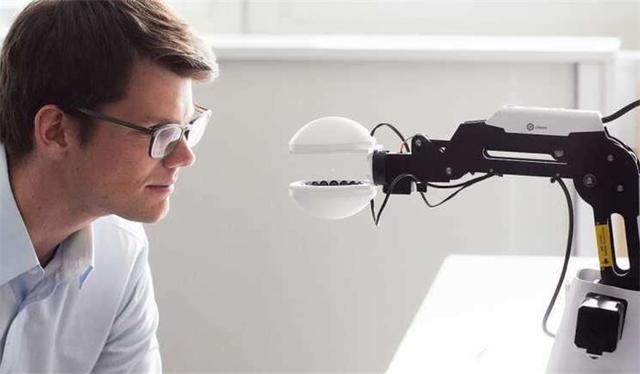
eth的先驱研究员marcel schuck正在研发一种机器人夹持器,这种夹持器可以在不接触小而易碎的物体的情况下操纵它们。这项技术是基于声波。
marcel schuck在他的工作台上组装的小装置让人想起了学校的一节物理课:一个由两个半球体组成的装置,类似于一对耳机,连接到一个携带微芯片的电路板上。他正在用这个装置演示物理效果。一个小球体悬浮在两个半球体之间,由超声波支撑。“这种现象被称为声悬浮。”他解释说。
作为在联邦理工学院的研究项目的一部分,这位前联邦理工学院博士生目前正在开发一种方法,可以完全举起和操纵小物体而不需要接触它们。在小型部件损坏需要花钱的情况下,例如在制表业或半导体行业,这一点尤其重要。
传统的机器人夹持器容易损坏脆弱的物体。为了解决这个问题,可以使用柔软的橡胶状钳子。虽然这些不会造成损害,但它们很容易被污染,就像橡皮擦一样。此外,这些柔性机器人夹持器只能提供有限的定位精度。
不接触也能抓住:这就是schuck的“无接触机器人”项目背后的原理。这项技术是基于一种已经被开发了80多年并首次用于太空探索的效应。超声波会产生一种人们看不见或听不见的压力场。压力点是声波相互叠加而形成的,小物体可以被困在这些压力点中。结果,它们似乎在空气中自由漂浮——在一个声学陷阱中。
经济效益
在实验室里安装的是schuck想要开发的产品的原型:一个使用超声波的电子控制机器人钳子。这位31岁的科学家用3d打印机在两个半球体上安装了许多小喇叭。相关的软件可以让schuck控制扬声器,这样压力点就可以移动。目标是实时改变它们的位置,而不让悬浮的物体掉到地上。联邦理工学院博士生马克·罗斯利斯伯格(marc rothlisberger)正在研究这一特殊的物体,他与schuck和研究生克里斯蒂安·伯卡尔德(christian burkard)在苏黎世科技园区共享一个实验室。
 本溪市全自动热压机Y品质售后无忧
本溪市全自动热压机Y品质售后无忧 Y永州市全自动木屑压块机高密成型 经久耐摔
Y永州市全自动木屑压块机高密成型 经久耐摔 邵阳市全自动三七灰土压块机寿命长 品质齐全Y
邵阳市全自动三七灰土压块机寿命长 品质齐全Y 邵阳市全自动四柱通用液压机Y液压系统原理图详解
邵阳市全自动四柱通用液压机Y液压系统原理图详解 Y宜春市自动液压焦煤焦末压块机行业经验丰富
Y宜春市自动液压焦煤焦末压块机行业经验丰富 安康市全自动液压焦煤压块机产品更多样化Y
安康市全自动液压焦煤压块机产品更多样化Y 关于全自动小型舔盐砖机Y价格低 使用方便
关于全自动小型舔盐砖机Y价格低 使用方便 Y新疆全自动食盐压块机高效率同时高品质
Y新疆全自动食盐压块机高效率同时高品质 内蒙全自动舔盐砖压块机一模多出 产量高Y
内蒙全自动舔盐砖压块机一模多出 产量高Y 南昌市全自动陶瓷粉末成型液压机Y规格多样
南昌市全自动陶瓷粉末成型液压机Y规格多样 Y重庆市全自动粉末成型液压机优势特性介绍
Y重庆市全自动粉末成型液压机优势特性介绍 南京市全自动铁剂锰剂粉末成型液压机的简述以及主要作用Y
南京市全自动铁剂锰剂粉末成型液压机的简述以及主要作用Y 咸阳市全自动炼钢脱氧剂压块机Y一模多出 规格多样
咸阳市全自动炼钢脱氧剂压块机Y一模多出 规格多样 Y永州市全自动海绵铁高密压块机上门服务 售后无忧
Y永州市全自动海绵铁高密压块机上门服务 售后无忧 镇江市全自动铁粉压块机性能稳定 操作简便Y
镇江市全自动铁粉压块机性能稳定 操作简便Y 邯郸市全自动还原铁压块机Y口碑好 销量好
邯郸市全自动还原铁压块机Y口碑好 销量好 Y赣州全自动稀土压块机环保节能 可定制尺寸
Y赣州全自动稀土压块机环保节能 可定制尺寸 四川全自动磨削泥压块机价格实惠 质量保证Y
四川全自动磨削泥压块机价格实惠 质量保证Y 焦作市全自动铁屑压块机Y磨耗低 电脑控制
焦作市全自动铁屑压块机Y磨耗低 电脑控制 Y北京全自动铝屑压块机性能稳定 价格实惠
Y北京全自动铝屑压块机性能稳定 价格实惠 上海全自动铜屑压块机源头厂家直销Y
上海全自动铜屑压块机源头厂家直销Y 河北全自动钢屑压块机Y质量好 低能耗
河北全自动钢屑压块机Y质量好 低能耗 Y河南全自动金属屑压块机型号多 支持定做
Y河南全自动金属屑压块机型号多 支持定做 各种尺寸配套定制整体移动喷漆房
各种尺寸配套定制整体移动喷漆房 德国baelz比例阀
德国baelz比例阀 轰天炮售后电话 轰天炮投影仪维修网点 图像黑点 发黄
轰天炮售后电话 轰天炮投影仪维修网点 图像黑点 发黄 极米售后电话 极米投影仪维修网点 Z6X不开机 模糊
极米售后电话 极米投影仪维修网点 Z6X不开机 模糊 移动式小麦烘干机 水稻小麦烘干机-全自动粮食烘干机
移动式小麦烘干机 水稻小麦烘干机-全自动粮食烘干机 废纸箱打包机-方捆打包机|废塑料打包
废纸箱打包机-方捆打包机|废塑料打包 日本宫胁MIYAWAKI阀门
日本宫胁MIYAWAKI阀门 霍尼韦尔HONEYWELL阀门
霍尼韦尔HONEYWELL阀门 废纸打包机器-废纸打包机批/废塑料打包
废纸打包机器-废纸打包机批/废塑料打包 打包机秸秆-废纸全自动打包机多少钱一台/自动液压打包机
打包机秸秆-废纸全自动打包机多少钱一台/自动液压打包机 大型秸秆粉碎打包机-草块打包机/方捆打包机
大型秸秆粉碎打包机-草块打包机/方捆打包机 日本HITACHI日立葫芦牌阀门
日本HITACHI日立葫芦牌阀门 耀希达凯机械(中国)有限公司
耀希达凯机械(中国)有限公司 衡水科胜麻辣花生酱灌装机|辣椒酱灌装机|油炸辣椒段灌装机
衡水科胜麻辣花生酱灌装机|辣椒酱灌装机|油炸辣椒段灌装机 周冬雨“少女感”式广告代言 豪华酒店品牌豪华精选酒店及度假村
周冬雨“少女感”式广告代言 豪华酒店品牌豪华精选酒店及度假村 燕小六华丽升职变身瓜州通判
燕小六华丽升职变身瓜州通判 华为P40系列创意短片《呐喊》
华为P40系列创意短片《呐喊》 多芬×孟美岐《我的肌调我来定》,女生就应该完美无瑕吗?
多芬×孟美岐《我的肌调我来定》,女生就应该完美无瑕吗? 邯郸科胜DXD液体自动包石老头芝麻酱包装机河北包装机
邯郸科胜DXD液体自动包石老头芝麻酱包装机河北包装机 香奈儿19手袋广告大片:既隽永经典,亦前卫摩登
香奈儿19手袋广告大片:既隽永经典,亦前卫摩登 Introducing Apple Watch Series 5 / Apple Watch 系列 5 官宣片
Introducing Apple Watch Series 5 / Apple Watch 系列 5 官宣片 新型草菇烘干机/草菇干燥设备/草菇烘干机多钱一台
新型草菇烘干机/草菇干燥设备/草菇烘干机多钱一台 知道测试知道测试知道测试知道测试知道测试1
知道测试知道测试知道测试知道测试知道测试1 山东全自动钢屑压块机高效稳定 现货供应Y
山东全自动钢屑压块机高效稳定 现货供应Y 邯郸科胜立式颗粒自动包装机|丰南大米称重机|炭粉包装机
邯郸科胜立式颗粒自动包装机|丰南大米称重机|炭粉包装机 大姜烘干机设备/大姜干燥机厂家/大姜烘干房价格
大姜烘干机设备/大姜干燥机厂家/大姜烘干房价格 反击式移动破碎机 移动反击式破碎机 移动反击式破碎机
反击式移动破碎机 移动反击式破碎机 移动反击式破碎机 新型菜干烘干机/菜干烘干机设备多少钱一台
新型菜干烘干机/菜干烘干机设备多少钱一台 邯郸科胜全自动灌装封尾机|蛋挞液自动封尾机|河北封尾机
邯郸科胜全自动灌装封尾机|蛋挞液自动封尾机|河北封尾机 陶瓷防静电地板学校专用地板
陶瓷防静电地板学校专用地板 欢乐果园水果 厂家
欢乐果园水果 厂家 新浪扶翼怎么开户,新浪扶翼广告怎么收费,新浪扶翼开户多少钱
新浪扶翼怎么开户,新浪扶翼广告怎么收费,新浪扶翼开户多少钱 邯郸给袋式真空包装机/自嗨锅料包/蔬菜包/牛肉给袋式包装机
邯郸给袋式真空包装机/自嗨锅料包/蔬菜包/牛肉给袋式包装机 阀天VENN疏水阀 倒吊桶式疏水阀 浮球式疏水阀
阀天VENN疏水阀 倒吊桶式疏水阀 浮球式疏水阀 德国baelz电动比例控制阀 德国baelz阀门代理商
德国baelz电动比例控制阀 德国baelz阀门代理商 出售水果
出售水果 出售二手洛阳大华1310反击破一台
出售二手洛阳大华1310反击破一台 桥梁专用润滑硅脂 橡胶保护润滑剂
桥梁专用润滑硅脂 橡胶保护润滑剂 降噪音轴承润滑脂
降噪音轴承润滑脂 中药提取浓缩设备科研实验室多功能加热提取机组
中药提取浓缩设备科研实验室多功能加热提取机组 求购二手1313反击破设备一台
求购二手1313反击破设备一台 行星齿轮润滑脂 绞肉机降噪音齿轮油
行星齿轮润滑脂 绞肉机降噪音齿轮油 求购二手山特CH660圆锥破碎设备
求购二手山特CH660圆锥破碎设备 气动阀润滑脂 电磁阀密封油膏
气动阀润滑脂 电磁阀密封油膏 中药提取浓缩中试机组实验室中药提取浓缩机组厂家价格
中药提取浓缩中试机组实验室中药提取浓缩机组厂家价格 手扶拖拉机起土豆机 小型马铃薯收获机 挖土豆红薯机器
手扶拖拉机起土豆机 小型马铃薯收获机 挖土豆红薯机器 荆州农作物玉米烘干机厂家 大豆小麦粮食烘干机 立式粮食烘干机生产线
荆州农作物玉米烘干机厂家 大豆小麦粮食烘干机 立式粮食烘干机生产线 女连体丝袜极度诱惑性感内衣吊带超薄夜店开档透明紧身打底连裤袜
女连体丝袜极度诱惑性感内衣吊带超薄夜店开档透明紧身打底连裤袜 APP下载今日头条推广开户多少钱
APP下载今日头条推广开户多少钱 建筑基坑支护锚杆钻机 高边坡支护锚固钻机 护坡锚固钻机
建筑基坑支护锚杆钻机 高边坡支护锚固钻机 护坡锚固钻机 不锈钢蒸汽夹层锅价格电加热不锈钢夹层锅厂家
不锈钢蒸汽夹层锅价格电加热不锈钢夹层锅厂家 催化燃烧吸附时间长 可循环利用
催化燃烧吸附时间长 可循环利用 小功率寝室锅煮面锅迷你小电锅小火锅电煮锅电热杯学生宿舍神器锅
小功率寝室锅煮面锅迷你小电锅小火锅电煮锅电热杯学生宿舍神器锅









